


Gotovo da postoji toliko različitih tipova pogona na sve točkove koliko je i vozila koja ih poseduju
Čini se da svaki proizvođač ima nekoliko različitih šema isporuke snage kada je o ovom tipu pogonskog sklopa reč. Doduše, jezik koji kompanije koriste često je zbunjujući, tako da pre nego što krenemo u ovu priču, hajde da najpre razjasnimo terminologiju.
- Pogon na četiri točka (4WD) – kada proizvođači govore o ovom sistemu, oni obično misle na sklop koji povremeno isporučuje pogon na sva četiri točka. Obično ga aktivira vozač u slučaju potrebe, odnosno terenske vožnje. Iz razloga koje ćemo istražiti kasnije u ovom članku, svi ovi sistemi su predviđeni za eksploataciju u uslovima slabijeg prijanjanja, što podrazumeva terensku vožnju, vožnju po snegu ili ledu.
- Pogon na sve točkove (AWD) – ovi sistemi se ponekad nazivaju permanentnim integralnim pogonom. Zaduženi su za savladavanje svih površina, kako asfaltnih tako i terenskih i u većini slučajeva ne mogu da se deaktiviraju. Po ovom tipu pogona je poznat Subaru.
Povremeni ili permanentni pogonski sistemi na sve točkove mogu da se analiziraju kroz istovetne kriterijume. Najbolji sistem će poslati tačno onoliko obrtnog momenta na svaki točak, koji maksimalno može da se iskoristi a da ne dođe do proklizavanja točka.
U ovom članku ćemo objasniti osnove pogona na sva četiri točka, počev od prijanjanja pa do komponenti koje karakterišu ovakve sklopove. Zatim ćemo obratiti pažnju na par različitih sistema, uključujući i onaj koji koristi vojno vozilo Hummer.
Treba da znamo ponešto o obrtnom momentu, prijanjanju i proklizavanju točkova, pre nego što krenemo u uvid različitih integralnih pogonskih sistema koji se mogu naći u automobilima.
Obrtni moment, prijanjanje i proklizavanje točka
Prvonavedena vrednost se odnosi na obrtnu silu koju proizvodi motor. Obrtni moment iz agregata je ono što pomera vozilo. Različiti zupčanici u menjaču i diferencijalu umnožavaju ga ili dele između točkova. Više obrtnog momenta može biti poslato na točkove u prvom nego u petom stepenu prenosa, jer prvi stepen ima veći prenosni odnos, uz pomoć kojeg umnožava obrtni moment.
Uvek na točkove treba da se isporuči manji obrtni moment od onog koji će prouzrokovati njihovo proklizavanje. Automobil koji dobro startuje nikada ne prelazi dotičnu granicu, dok kod lošeg starta tipično dolazi do proklizavanja guma. A kada dođe do toga, obrtni moment pada gotovo na nultu vrednost.

Interesantna stvar u vezi s obrtnim momentom je što u situacijama kada je prijanjanje smanjeno, maksimalna količina obrtnog momenta koja može da se kreira, određena je stepenom prijanjanja, ne motorom. Čak i da imate trkački motor ispod haube vašeg automobila, ukoliko se gume „ne zalepe“ za površinu, jednostavno ne postoji način da se ta snaga iskoristi.
Dakle, definisaćemo prijanjanje kao maksimalnu količinu sile koju guma može da primeni na voznu površinu (ili obrnuto). Evo i faktora koji utiču na prijanjanje:
Težina gume. Što je guma veće mase, ona bolje prijanja. Težina se može prebacivati kako se automobil kreće. Primera radi, kada dolazi do zaokreta, težina se prebacuje na spoljne točkove, kada automobil ubrzava, ona se prebacuje na zadnje točkove. Detaljnije smo ovu pojavu objasnili u članku o kočnicama, što možete pročitati OVDE.
Koeficijent prijanjanja. Ovaj faktor se odnosi na količinu primenjene sile prijanjanja između dve površine na silu koja drži dve površine spojenim. U našem slučaju, reč je o stepenu prijanjanja između guma i putne površine na težinu svake gume. Koeficijent prijanjanja je obično u korelaciji između vozila i tipa površine po kojoj se ono kreće. Primera radi, gume na trkačkim automobilima imaju visok stepen prijanjanja kada se voze po suvom asfaltu. To je jedan od razloga zašto su oni sposobni da prolaze krivine mnogo efikasnije od serijskih automobila, koliko god snažni ovi bili. Koeficijent prijanjanja za istu gumu na blatnjavoj površini će biti gotovo nulti. Nasuprot tome, masivni terenski pneumatici s kramponima neće imati visok koeficijent prijanjanja na suvoj stazi, ali će se u blatu osećati kao „riba u vodi“.
Proklizavanje točka. Postoje dve vrste kontakta koju gume mogu ostvariti s voznom površinom: statički i dinamički:
- statički kontakt: guma i vozna površina ne proklizavaju međusobno. Koeficijent prijanjanja za statički kontakt je viši nego u slučaju dinamičkog kontakta, tako da statički kontakt obezbeđuje bolje prijanjanje.
- dinamički kontakt: guma proklizava u odnosu na površinu puta. Koeficijent prijanjanja kod dinamičkog kontakta je niži, tako da je i niži stepen prijanjanja.
Pojednostavljeno, do proklizavanja točkova dolazi kada sila primenjena na njih prevazilazi prijanjanje koje guma može da isporuči. Sila se na točkove isporučuje na dva načina:
- longitudinalno: uzdužna sila dolazi iz obrtnog momenta primenjenog na gumu od strane motora ili kočnica. Ima tendenciju da ili ubrzava ili usporava vozilo.
- lateralno: bočna sila se kreira kada se automobil kreće kroz krivine. Sila je neophodna da bi automobil promenio pravac, a na kraju, gume i vozna podloga obezbeđuju bočnu silu.
U slučaju da recimo imate prilično snažan automobil s pogonom na zadnje točkove i vozite kroz krivinu po vlažnom putu, gume pružaju visok stepen prijanjanja da bi isporučile bočnu silu neophodnu da se vozilo drži u zadatoj putanji. Recimo da pritisnite papučicu gasa usred krivine (što naravno nemojte raditi); u tom slučaju motor šalje veliku količinu uzdužne sile. Ukoliko nju dodate bočnoj sili koja nastaje u krivini, zbir će prevazići silu neophodnu za prijanjanje, tako da će doći do neizbežnog proklizavanja točkova.

Većina ljudi se ni ne približava tački kada isporučeni obrtni moment dovodi do proklizavanja na suvom putu, pa čak ni vlažnom. Pogoni na sve točkove su najupotrebljiviji upravo u situacijama kada je prijanjanje smanjeno, bilo da se radi o snegu, blatu, klizavim uzbrdicama, nizbrdicama i slično.
Prednosti pogona na sva četiri točka je lako razumeti: ukoliko su četiri točka pogonska umesto dva, raspolažete potencijalom da udvostručite uzdužnu silu (to je ona koja pokreće vozilo) koja se preko guma isporučuje na put.
To može biti od pomoći u brojnim situacijama. Na primer:
- na snegu: potrebna je velika sila da bi se automobil kretao kroz sneg. Količina dostupne sile je ograničena stepenom dostupnog prijanjanja. Većina automobila s pogonom na dva točka se neće ni pomeriti ukoliko je sneg nešto dublji, jer u snegu, gume raspolažu malim stepenom prijanjanja. Automobili s integralnim pogonom, naravno, mogu da koriste pogonsku silu na sva četiri točka.
- terenska vožnja: u „off-road“ uslovima, prilično je uobičajeno da se neki od točkova nađu u uslovima slabog ili nultog prijanjanja, poput recimo prelaska potoka ili blatnjavih površina. U tom slučaju, točkovi koji imaju prijanjanje izvlače vozilo iz nezgodne situacije.
- penjanje uzbrdo kada je klizavo: ovaj zadatak zahteva obilje prijanjanja. Automobil s integralnim pogonom može da iskoristi „višak“ prijanjanja na sva četiri točka i da obavi posao. Ipak, postoje neke situacije u kojima ne postoji prednost u odnosu na pogon na dva točka. Naime, integralni pogon vam neće pomoći ukoliko se zaustavite na klizavoj površini. U tom slučaju sve je na kočnicama i ABS-u.
Kada smo utvrdili osnovne stvari, hajde da vidimo od kojih se komponenti sastoji integralni pogonski sklop.
Komponente pogona na sva četiri točka
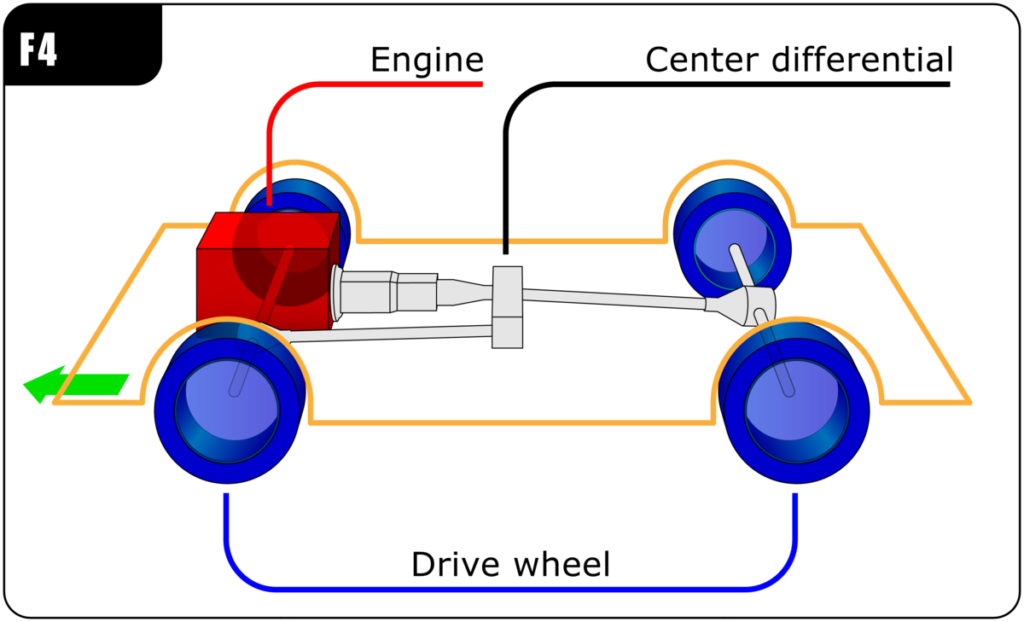
Glavni delovi svakog pogonskog sistema na sve točkove su dva diferencijala (prednji i zadnji) i prenosni reduktor. Pored navedenih, sklopovi s povremenim integralnim pogonom imaju redukcioni sistem zupčanika na glavčini poluosovine diferencijala, a oba tipa mogu posedovati naprednu elektroniku, koja im pomaže da još bolje iskoriste stepen prijanjanja koji im je na raspolaganju.
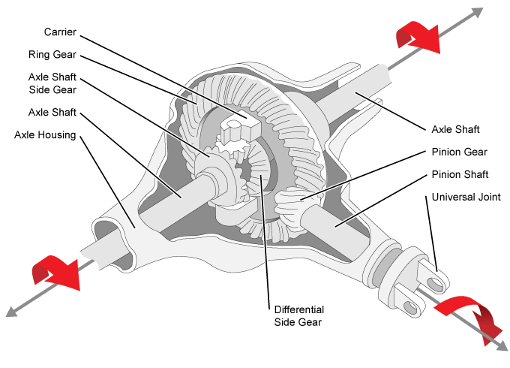
Diferencijali
Automobil ima dva diferencijala, jedan lociran između prednjih i drugi između zadnjih točkova. Oni šalju obrtni moment s pogonskog vratila ili iz menjača na pogonske točkove. Oni takođe omogućuju da se levi i desni točkovi okreću različitim brzinama prilikom skretanja.
Kada vozite ukrug, unutrašnji točkovi prate drugačiju putanju od spoljašnjih, kao što prednji točkovi prate drugačiju putanju od zadnjih, tako da se svaki točak okreće različitom brzinom. Diferencijali omogućuju razliku u brzini između spoljašnjih i unutrašnjih točkova. Kod AWD pogona, razlika u brzini između prednjih i zadnjih točkova se reguliše prenosnim reduktorom.
Postoji nekoliko različitih vrsta diferencijala koji se koriste u automobilima i kamionima. Tipovi diferencijala mogu imati znatan uticaj na to koliko efikasno vozilo koristi dostupno prijanjanje.

Prenosni reduktor
Ovo je uređaj koji deli isporuku snage između prednje i zadnje osovine na automobilu s pogonom na sve točkove.
Da se vratimo na prethodni primer vožnje ukrug: dok diferencijali usklađuju razliku u brzini kretanja između unutrašnjih i spoljnih točkova, prenosni reduktor u integralnom pogonskom sistemu poseduje uređaj koji omogućava razliku u brzini između prednjih i zadnjih. To može da bude hidraulična spojnica, centralni diferencijal ili neki drugi tip garniture zupčanika. Ovi uređaji osiguravaju da pogon na sve točkove funkcioniše kako treba na bilo kojoj voznoj podlozi.
Prenosni reduktor na vozilima s povremenim pogonom na sve točkove zaključava i spaja pogonsko vratilo na prednjoj osovini s pogonskim vratilom zadnje osovine, tako da su točkovi prisiljeni da se okreću istom brzinom. Ovo zahteva proklizavanje točkova kada automobil skreće. Povremeni integralni pogonski sistemi bi trebalo da se koriste isključivo u situacijama kada nedostaje prijanjanja, odnosno kada gume lako proklizavaju. Na suvom asfaltu je mnogo teže da dođe do proklizavanja, tako da pogon na sve točkove treba da bude isljučen da bi se izbegla nepredviđeno ponašanje vozila prilikom skretanja i dodatno habanje guma i pogona.

Neki prenosni reduktori, češći u povremenim pogonskim sistemima na sve točkove, takođe poseduju dodatnu garnituru zupčanika, da bi omogućile takozvanu „low range“ vožnju. Ovaj dodatni prenosni odnos obezbeđuje više obrtnog momenta i ekstremno sporu izlaznu brzinu. U prvom stepenu prenosa u „low range“ režimu, vozilo može da se kreće oko 8 km/h, ali s druge strane se na točkove šalje visok obrtni moment. Ovo vozačima omogućava da se polako i bez problema penju strmim uzbrdicama.
Redukcioni sistem zupčanika na glavčini poluosovine diferencijala
Svaki točak u automobilu stoji na glavčini. Kamioneti s povremenim pogonom na sve točkove obično imaju redukcioni sistem zupčanika na prednjim točkovima. Kada integralni pogon nije angažovan, oni se koriste da prekinu vezu između prednjih točkova i prednjeg diferencijala, odnosno poluosovina i pogonskog vratila. Ovo omogućava da diferencijal, poluosovine i pogonsko vratilo prestanu da se vrte kada je automobil u režimu pogona na zadnje točkove, što se što smanjuje habanje, poboljšava ekonomičnost.
Napredna elektronika
Na mnogim modernim 4WD i AWD vozilima, napredna elektronika igra ključnu ulogu. Neki automobili koriste ABS sistem, koji se selektivno aktivira kočnice kada točkovi počnu da proklizavaju. Ovo se zove kontrola prijanjanja pri kočenju.
Drugi poseduju sofisticirane, elektronski kontrolisane lamele, koje na bolji način mogu da kontrolišu transfer obrtnog momenta između točkova. Kasnije u članku ćemo se posvetiti detaljnije jednom takvom naprednom sistemu.
Najpre, hajde da vidimo kako funkcioniše najosnovniji povremeni pogonski sistem na sva četiri točka.
Pogon na sva četiri točka s klasičnim diferencijalom
Ovaj tip povremenog integralnog pogona se tipično može pronaći na starijim SUV vozilima. Njih obično karakteriše zadnji pogon kao osnovni, a menjačka kutija je mahom direktno spojena s prenosnim reduktorom, iz kojeg jedno pogonsko vratilo okreće prednju, a drugo zadnju osovinu.
Kada je pogon na sva četiri točka angažovan, prenosni reduktor spaja prednje i zadnje pogonsko vratilo, tako da svaka osovina dobija polovinu obrtnog momenta koji dolazi iz motora. U isto vreme, zaključava se sistem zupčanika na prednjoj glavčini poluosovine diferencijala.
Prednja i zadnja osovina imaju klasične diferencijale. Mada ovaj sistem obezbeđuje bolje prijanjanje u odnosu na vozila s pogonom na dva točka, on ima i dva velika nedostatka, gde smo o jednom već diskutovali: ne može da se koristi na asfaltu zbog zaključavanja prenosnog reduktora.
Uzrok drugog problema je tip diferencijala koji se koristi: klasičan diferencijal razdvaja podjednako obrtni moment između dva točka na koje je povezan. Ukoliko jedan od dotična dva točka izgubi kontakt s površinom ili se nađe na veoma klizavoj površini, obrtni moment pada na nulu. Iz razloga što se obrtni moment distribuira podjednako, drugi točak takođe dobija nulti obrtni moment. Čak i da drugi točak raspolaže visokim stepenom prijanjanja, obrtni moment mu se ne isporučuje.
Prethodno smo spomenuli da je najbolji onaj integralni pogonski sistem, koji isporučuje maksimalnu količinu obrtnog momenta na svaki točak ponaosob, ali koji neće dovesti do njihovog proklizavanja. Sistem koji smo opisali se baš i ne kotira visoko po ovom kriterijumu.
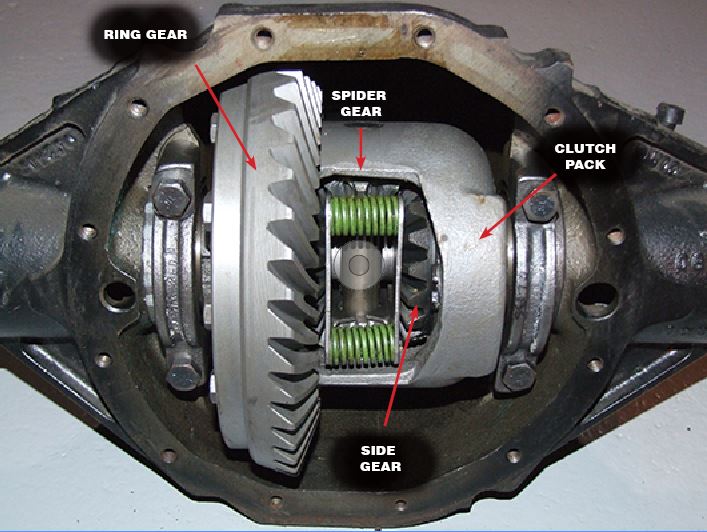
Postoje načini da se takvi sistemi unaprede. Zamena klasičnog diferencijala onim s ograničenim proklizavanjem je najčešće rešenje. Ovo osigurava da su oba zadnja točka sposobna da prenesu izvesnu količinu obrtnog momenta bez obzira na uslove. Još jedna opcija je blokada diferencijala, koja zaključava zadnje točkove i obezbeđuje da svaki od njih ima pristup svom obrtnom momentu koji dolazi s osovine, čak i ukoliko jedan točak nema kontakt s površinom. Ovo uveliko poboljšava performanse kada je terenska vožnja u pitanju.
Ukoliko uzmemo u obzir da bi Hummer po mnogim osnovama mogao da bude ultimativno vozilo s pogonom na sve točkove, pozabavićemo se malo i njime.
AM General Hummer
Ovo vojno vozilo kombinuje napredna mehanička rešenja i sofisticiranu elektroniku, što za rezultat ima verovatno jedan od najboljih pogona na sve točkove današnjice.
Hummer poseduje permanentni integralni pogon s dodatnim karakteristikama, koje se mogu aktivirati za još bolje „off-road“ performanse. Kod ovog sistema, baš kao i u onom osnovnom, transmisija je zakačena na prenosni reduktor. Od njega, jedno pogonsko vratilo je povezano na prednju a drugo na zadnju osovinu. Međutim, prenosni reduktor na Hummeru ih ne spaja i ne zaključava automatski. Umesto toga, sadrži garnituru spregnutih zupčanika klasičnog diferencijala koje može da blokira vozač. U otvorenom režimu (nezaključanom), prednja i zadnja osovina se mogu kretati različitim brzinama, tako da se vozilo može kretati po suvom asfaltu bez problema. Kada je diferencijal zaključan, prednja i zadnja osovina imaju, svaka posebno, pristup obrtnom momentu koji dolazi iz motora. Ukoliko su prednji točkovi upali u pesak, zadnji će dobijati sav raspoloživi obrtni moment.

Oba diferencijala, i prednji i zadnji, Torsen su tipa. Njih karakteriše jedinstven snop zupčanika: čim oseti da dolazi do smanjenja obrtnog momenta na jednom točku (što se obično dešava pre proklizavanja), ovaj snop zupčanika šalje obrtni moment na drugi točak. Ovo je veliko unapređenje u odnosu na klasične diferencijale. Međutim, ukoliko jedan točak izgubi kontakt s tlom, drugi i dalje ne dobija obrtni moment.
Da bi se dotični problem rešio, Hummer je opremljen sistemom kontrole prijanjanja pri kočenju. Kada jedan točak krene da proklizava, kontrola prijanjanja pri kočenju aktivira kočnicu na tom točku. Na ovaj način se postižu dve stvari:
- sprečava se proklizavanje, obezbeđujući maksimalno iskorišćenje dostupnog prijanjanja
- osigurava se da drugi točak isporučuje na tlo više obrtnog momenta
Da bi Hummer ostao zaglavljen, neophodno je da sva četiri točka u potpunosti izgube prijanjanje.
Sistem kontrole prijanjanja pri kočenju primenjuje značajnu količinu obrtnog momenta na točak koji želi da proklizava, omogućujući Torsen diferencijalu da primeni dva do četiri puta povećan obrtni moment na drugi točak.
Hummerov sistem je kadar da pošalje obilje obrtnog momenta na bilo koji točak koji ima prijanjanje, čak i ukoliko to znači da je reč o samo jednom. Ovo Hummer dovodi blizu definicije idealnog integralnog pogonskog sistema, odnosno onog koji može da isporuči maksimalno iskoristiv obrtni moment, a da ne dođe do proklizavanja.
Pavle Barta









